

Dlaczego roboty modułowe?
Elastyczne możliwości konfiguracji - lepsze dostosowanie do potrzeb aplikacji.
Moduły można łączyć w różnych konfiguracjach, dostosowując układ kinematyczny do potrzeb aplikacji. Nie zawsze zastosowanie standardowego robota jest konieczne. Czasem do obsługi procesu wystarczą 3 lub 4 odpowiednio skonfigurowane osie.
Gotowy system pozycjonowania spełniający wszystkie normy CE
Moduły mogą być dostarczone jako gotowy układ kinematyczny wyposażony w pełny układ sterowania wraz z Teach Pendantem. Tak samo jak gotowy robot przemysłowy lub współpracujący stanowią w takim przypadku wydzielona część urządzenia spełniającą konieczne normy CE i normy bezpieczeństwa (wbudowany SAFETY PLC).
Szybkie uruchomienie
Gotowy system można łatwo i szybko zintegrować z pozostałymi elementami linii produkcyjnej. Program pracy robota tworzymy przy pomocy Teach Pendanta, co powoduje, że uruchomienie jest proste i nie wymaga znajomości skomplikowanych procedur programowania ruchu napędów.
Łatwa modernizacja lub przebudowa w przyszłości
Każdy z modułów stanowi osobne urządzenie, wewnątrz którego umieszczony jest silnik i przekładnia. Moduły mogą być wyposażone w hamulec, driver i inne akcesoria. Mogą być połączone z przygotowanym wcześniej układem sterowania. Takie podejście umożliwia przebudowę manipulatora i wykorzystanie poszczególnych członów w innych aplikacjach.
Współpraca z różnymi układami sterowania
Moduły mogą współpracować z dowolnym układem sterowania, który umożliwia komunikację przez protokół EtherCAT.
Dostosowane do standardów Przemysłu 4.0
Cyfrowe bliźniaki systemu modułów dostępne są w dostarczanym przez nas oprogramowaniu symulacyjnym SIMULTUS, w którym można poeksperymentować z różnym ich konfiguracjami. Program sterujący można tworzyć w symulacji a gotowy i przetestowany przekopiować do urządzenia. System współpracuje również z Systemem OmniMES służącym do monitoringu maszyn i zarządzania produkcją.
Budowa systemu modułowego

Wybór opcji robotów modułowych
Potrzebuję pojedyncze moduły
W naszej ofercie znajdują się szybciej dostępne moduły standardowe. Mogą być one dostosowane do Państwa aplikacji poprzez dobór różnych opcji ich wykonania.
Listę dostępnych opcji można sprawdzić na stronie z kodem oznaczenia. Poproś naszych specjalistów o pomoc w doborze modułów odpowiednich dla Twojej aplikacji.
Potrzebuję standardowy gotowy zestaw
Paleta naszych standardowych zestawów ciągle jest powiększana. Znajdują się w niej roboty od 2 do 6 osi z gotowym systemem sterowania i Teach Pendantem. Zestawy spełniają normy CE oraz są wyposażone w odpowiednie systemy bezpieczeństwa jak SafetyPLC.
Potrzebuję indywidualny zestaw
Dostarczamy gotowe do uruchomienia, spełniające normy bezpieczeństwa układy kinematyczne przygotowane według Państwa specyfikacji. Mogą być wyposażone w system sterowania oraz Teach Pendant.
W celu ustalenia szczegółów prosimy o kontakt z naszą pomocą techniczną.

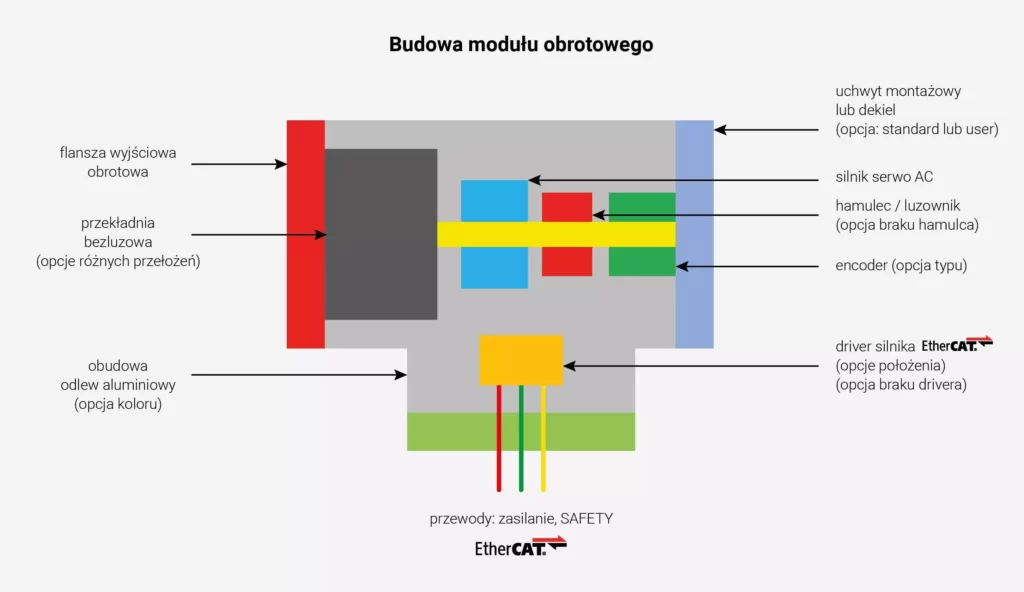
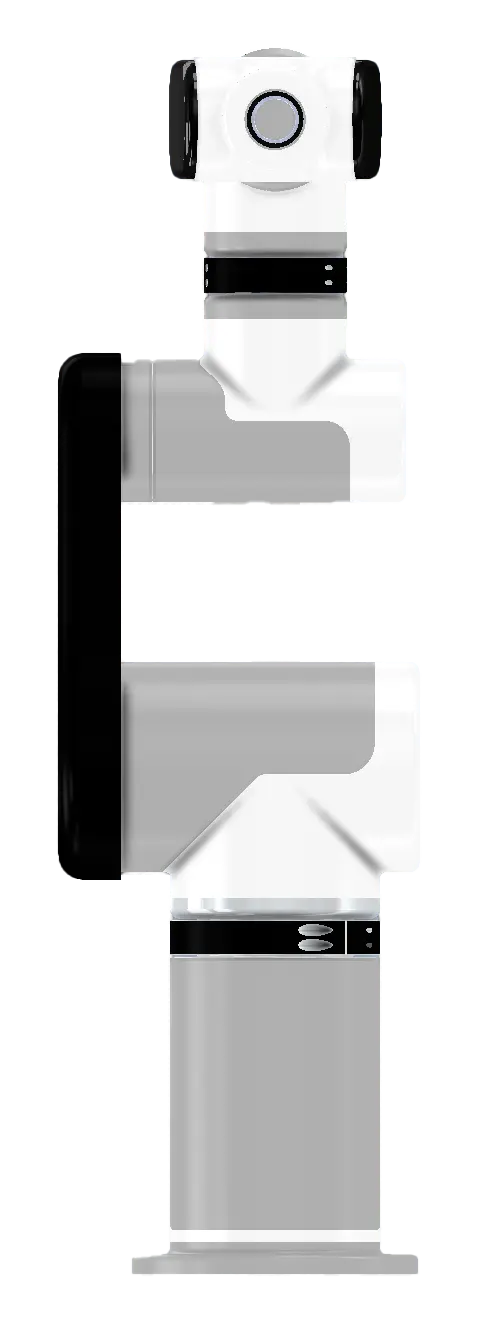
Budowa modułu obrotowego
Specyfikacja - moduły obrotowe 1-osiowe
Moduły obrotowe 1-osiowe - modele podstawowe i parametry techniczne


W tabeli przedstawiono parametry modułów standardowych MR-R1~MR-R9. Dostępne są również moduły z innymi parametrami (patrz tabela KOD OZNACZENIA). Prosimy o kontakt z naszą pomocą techniczno-handlową w sprawie szczegółów i dostępności opcji.
| Moduły obrotowe | MR-R1 | MR-R2 | MR-R3 | MR-R4 | MR-R5 | MR-R6 | MR-R7 | MR-R8 | MR-R9 |
|---|---|---|---|---|---|---|---|---|---|
| Obudowa | S 110 | S 110 | S 110 | S 115 | S 130 | S 130 | S 130 | S 130 | S 169 |
| Przełożenie przekładni | 50 | 80 | 100 | 5 | 80 | 120 | 50 | 80 | 120 |
| Moment znamionowy [Nm] | 14,5 | 23,2 | 29 | 33 | 52,8 | 79,2 | 54 | 86,4 | 129,6 |
| Prędkość obrotowa znamionowa [°/s] | 420 | 260 | 216 | 316 | 198 | 132 | 415 | 259 | 173 |
| Prędkość obrotowa max [°/s] | 420 | 260 | 216 | 420 | 265 | 175 | 420 | 263 | 175 |
Specyfikacja - moduł obrotowy 2-osiowy (kiść)



| Kiść K1 | Kiść K2 | Kiść K3 | ||||
|---|---|---|---|---|---|---|
| oś 1 | oś 2 | oś 1 | oś 2 | oś 1 | oś 2 | |
| Moment znamionowy [Nm] | 13,3 | 8 | 21,28 | 12,8 | 26,6 | 16 |
| Prędkość obrotowa znamionowa [o/s] | 216 | 360 | 135 | 225 | 108 | 180 |
| Prędkość obrotowa max [o/s] | 432 | 540 | 270 | 337,5 | 216 | 270 |
| Moc silnika [W] | 100 | 50 | 100 | 50 | 100 | 50 |
| Przełożenie przekładni [-] | 50 | 50 | 80 | 80 | 100 | 100 |
| Zakres ruchu [deg] | +/- 90 | no limit | +/- 90 | no limit | +/- 90 | no limit |
Położenie i typ flansz montażowych
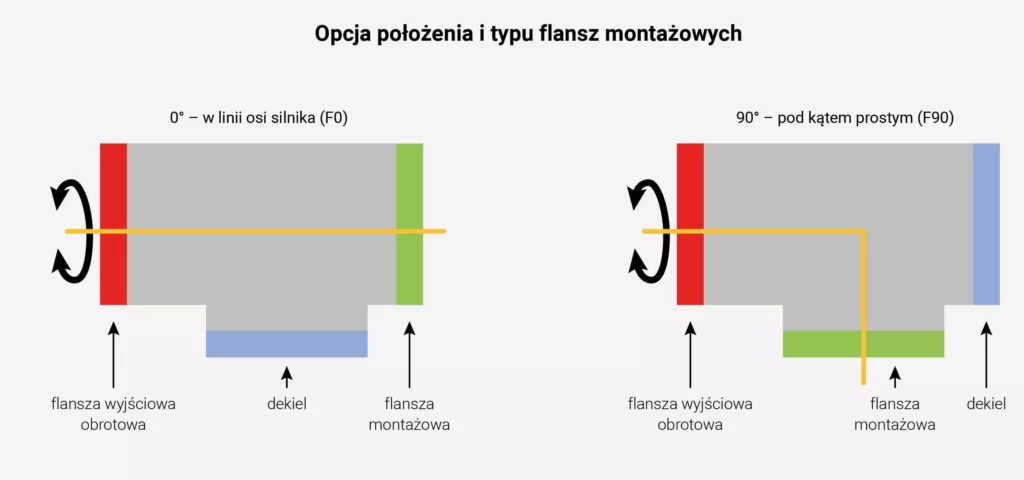
W zależności od budowy łańcucha kinematycznego moduły mogą mieć flaszę montażową (kolor zielony) zamontowaną w linii z osią wirnika (typ F0) lub pod kątem 90 stopni (typ F90). Flansza może być standardowa lub wykonania na zamówienia użytkownika.
Położenie drivera silnika serwo
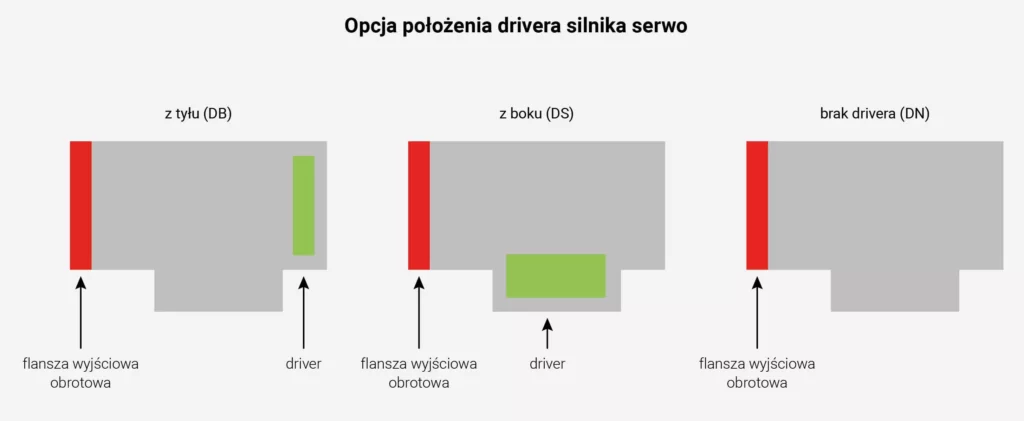
Niezależnie od położenia i typu flanszy montażowej można wybrać położenie drivera silnika serwo. Opcjonalnie moduł może nie mieć zamontowanego drivera wewnątrz obudowy. W takim przypadku driver musi się znajdować na zewnątrz modułu.
Przykładowe opcje położenia przewodów
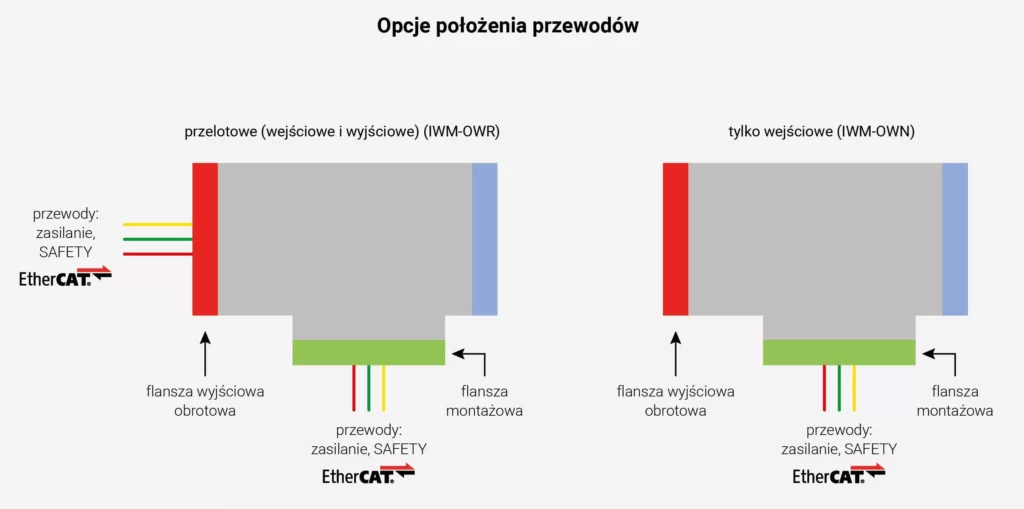
W przypadku, gdy moduł stanowi środek łańcucha kinematycznego, to przewody (wejściowe i wyjściowe) mogą być wyprowadzone od strony flanszy montażowej oraz wyjściowej. Jeżeli do danego modułu nie są dołączone kolejne to przewody wejściowe mogą również być wyprowadzone tylko od strony flanszy montażowej. Przewody mogą również być wyprowadzone z dekli. Pozostałe opcje prowadzenia przewodów wg tabeli kodów oznaczeń. Prosimy o kontakt z naszą obsługa techniczno-handlową w sprawie szczegółów i dostępności opcji.
Pilot (Tech Pendant) robota modułowego

Teach Pendant
Teach Pendant służy do programowania ruchów robota (manipulatora). Można przy jego użyciu stworzyć zarówno prosty jak i bardzo zaawansowany program ruchu robota. Tak jak w przypadku standardowych robotów pozwala na zapamiętanie pozycji oraz utworzenie programu ruchów między zapamiętanymi punktami wraz z warunkami przejścia. Pozwala również sterować robotem w trybie manualnym. Programowanie jest intuicyjne i nie wymaga zaawansowanej wiedzy programistycznej.

Chcesz przetestować to urządzanie w 3D?
Pobierz cyfrowego bliźniaka TeachPendanta z przykładowym robotem modułowym
Sterownik robota modułowego
Sterownik
Gotowy sterownik spełnia wszystkie wymogi bez- pieczeństwa związane z robotami (między innymi wbudowany sterownik SAFETY PLC). Wbudowane we/wy cyfrowe. Protokół EtherCAT.
Złącza:
– Ethernet
– USB
– gniazdo robota modułowego
– gniazdo Teach Pendanta
– zasilanie 230V
– wejścia/wyjścia cyfrowe (DI/DO)
– wejścia/wyjścia analogowe (AI/AO)
Przyciski i przełączniki:
– E-Stop
– przełącznik AUTO/MANUAL (kluczyk)
– główny przełącznik zasilania ON/OFF
– przyciski START/STOP, POWER ON/OFF

Simultus - Program narzędziowy 3D
Bezpłatne oprogramowanie na komputerze PC umożliwia testowanie systemu w wirtualnej wersji w 3D bez konieczności zakupu sprzętu (cyfrowy bliźniak). Import brył 3D z programów CAD umożliwia testowanie własnego stanowiska produkcyjnego. Zaawansowane oprogramowanie umożliwia symulacje z wykorzystaniem fizyki ciała stałego.
Chcesz przetestować to urządzanie w 3D?
Pobierz cyfrowego bliźniaka TeachPendanta z przykładowym robotem modułowym
Roboty modułowe
Zmontowane układy kinematyczne na indywidualne zamówienie
Projektujemy, wykonujemy i dostarczamy gotowe do uruchomienia, spełniające normy bezpieczeństwa dostosowane do aplikacji układy kinematyczne według specyfikacji klienta. W celu ustalenia szczegółów prosimy o kontakt z naszymi doradcami techniczo-handlowymi.
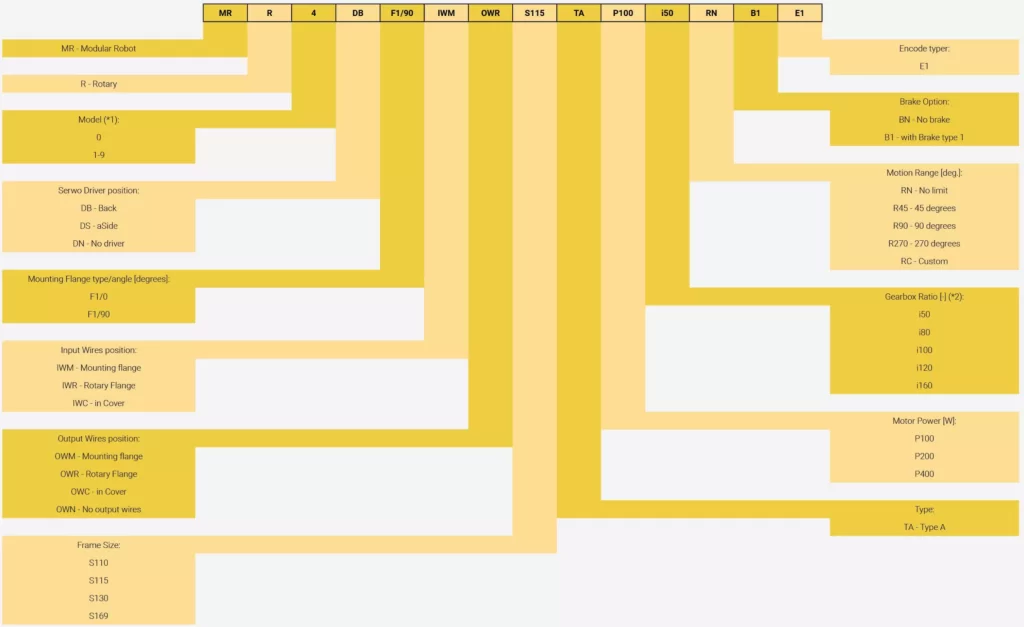
Kody oznaczeń - moduły obrotowe
*1 – wyróżnik modelu standardowego od 1 do 9, dla innych opcji wpisać ‚0’
*2 – tabela możliwych przełożeń dla określonej wiekości obudowy Sxxx po prawej
*3 – Multiturn Absolut Encoder 65536 ppr
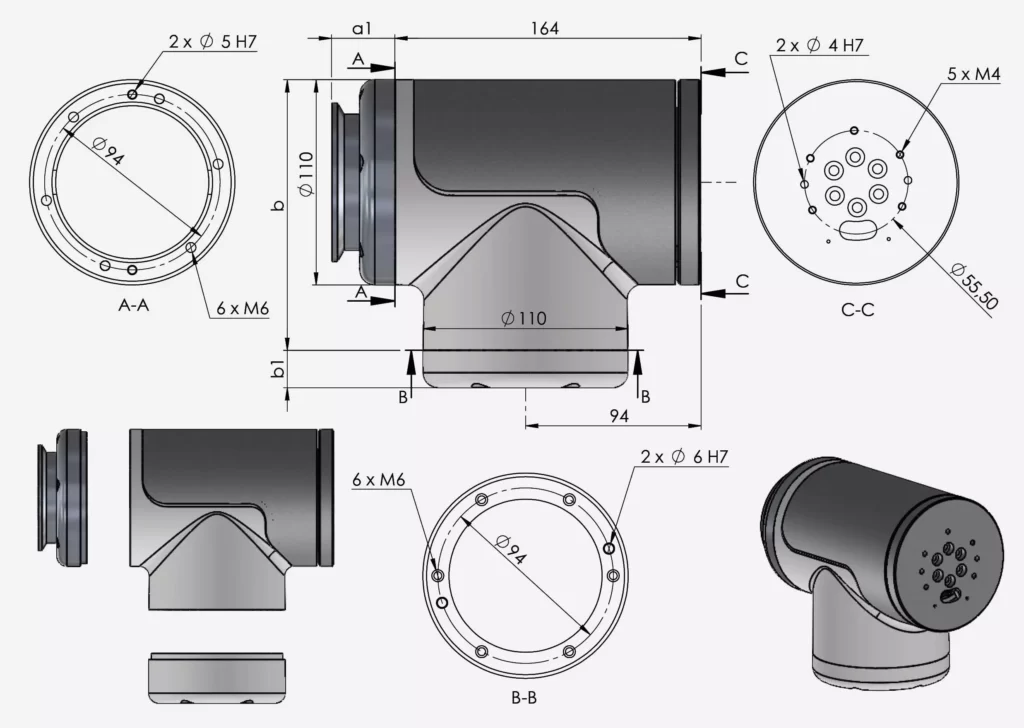
Rysunek gabarytowy - MR-R-F1/0-S110
| MR-R-F1/0-S110 | ||
|---|---|---|
| Serwo driver position | DB | DS |
| a1 [mm] | 103 | 44 |
| b [mm] | 112 | 145 |
| b1 [mm] | 8 | 35 |
Rysunek gabarytowy - MR-R-F1/90-S110
| MR-R-F1/90-S110 | ||
|---|---|---|
| Serwo driver position | DB | DS |
| a1 [mm] | 88 | 28 |
| b [mm] | 112 | 145 |
| b1 [mm | 23 | 50 |
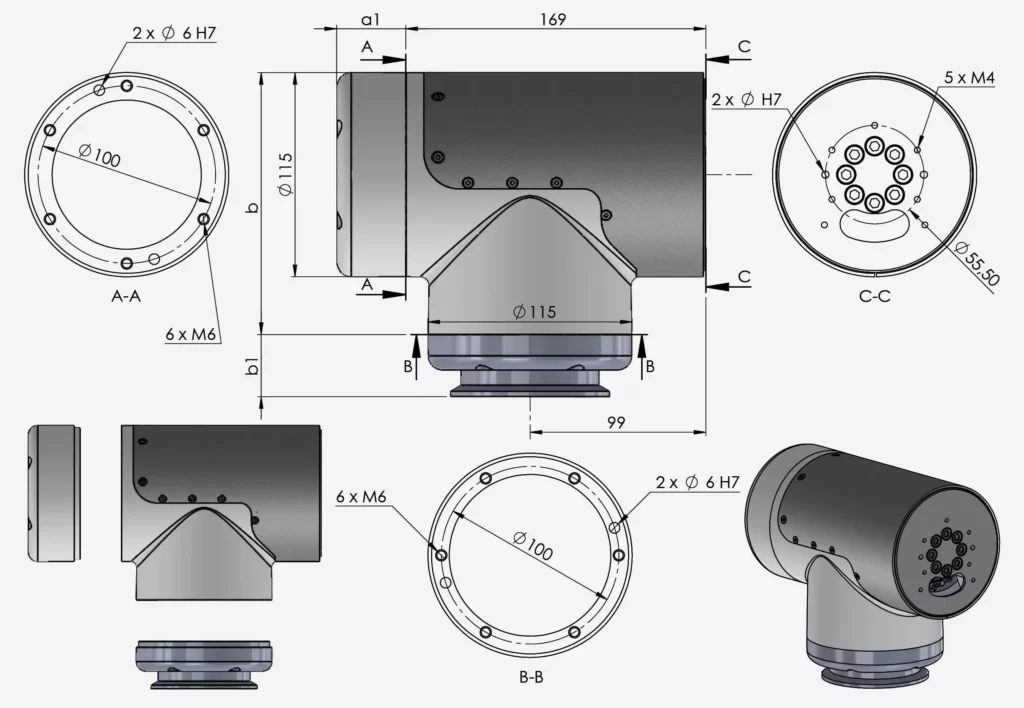
Rysunek gabarytowy - MR-R-F1/0-S115
| MR-R-F1/0-S115 | ||
|---|---|---|
| Serwo driver position | DB | DS |
| a1 [mm] | 108 | 45 |
| b [mm | 117 | 147,5 |
| b1 [mm] | 8 | 55 |
Rysunek gabarytowy - MR-R-F1/90-S115
| MR-R-F1/90-S115 | ||
|---|---|---|
| Serwo driver position | DB | DS |
| a1 [mm | 95 | 30 |
| b [mm] | 117 | 147,5 |
| b1 [mm] | 23 | 55 |
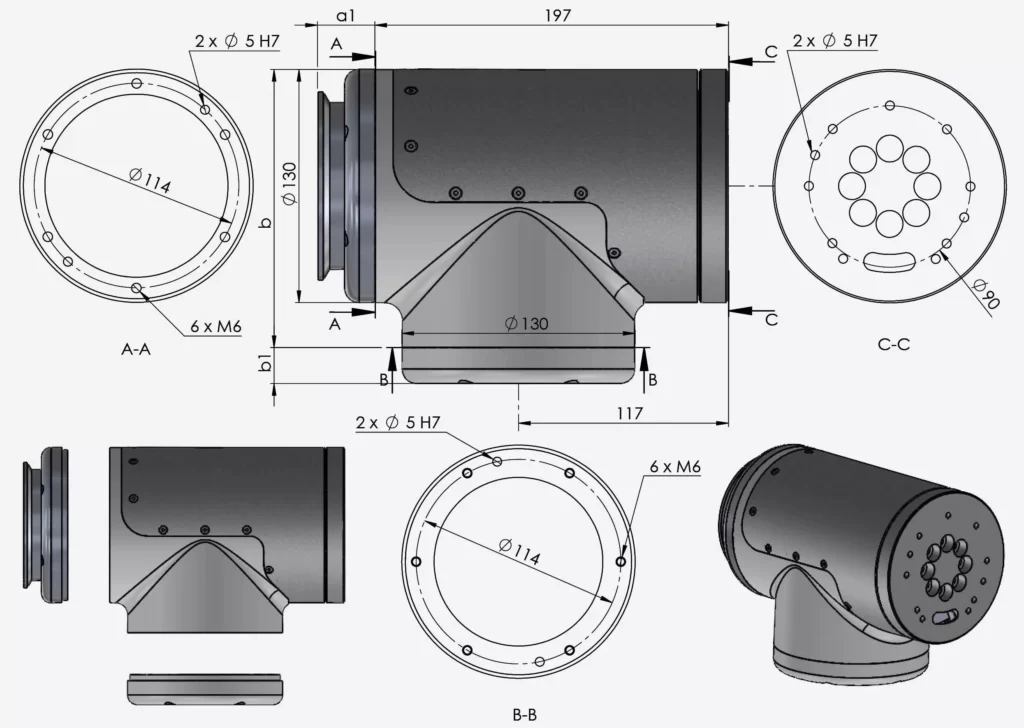
Rysunek gabarytowy - MR-R-F1/0-S130
| MR-R-F1/0-S130 | ||
|---|---|---|
| Serwo driver position | DB | DS |
| a1 [mm] | 88 | 32 |
| b [mm] | 132 | 155 |
| b1 [mm] | 8 | 45 |
Rysunek gabarytowy - MR-R-F1/90-S130
| MR-R-F1/90-S130 | ||
|---|---|---|
| Serwo driver position | DB | DS |
| a1 [mm] | 75 | 18 |
| b [mm] | 132 | 155 |
| b1 [mm] | 23 | 60 |
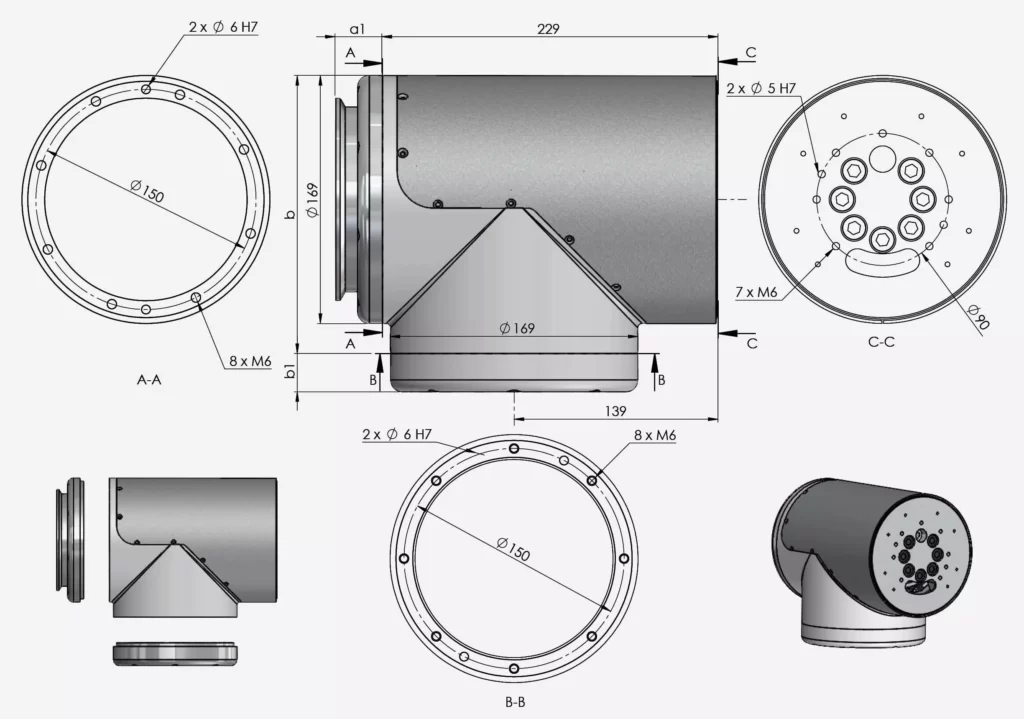
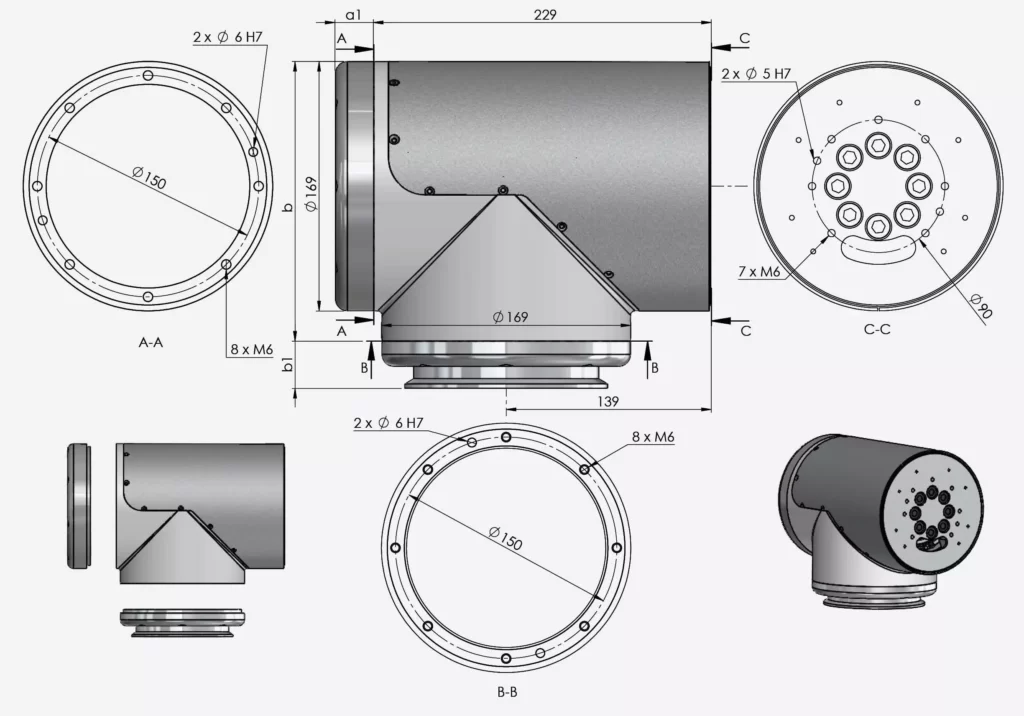
Rysunek gabarytowy - MR-R-F1/0-S169
| MR-R-F1/0-S169 | ||
|---|---|---|
| Serwo driver position | DB | DS |
| a1 [mm] | 90 | 28 |
| b [mm] | 171 | 189,5 |
| b1 [mm] | 8 | 35 |
Rysunek gabarytowy - MR-R-F1/90-S169
| MR-R-F1/90-S169 | ||
|---|---|---|
| Serwo driver position | DB | DS |
| a1 [mm] | 75 | 18 |
| b [mm] | 171 | 189,5 |
| b1 [mm] | 23 | 32 |
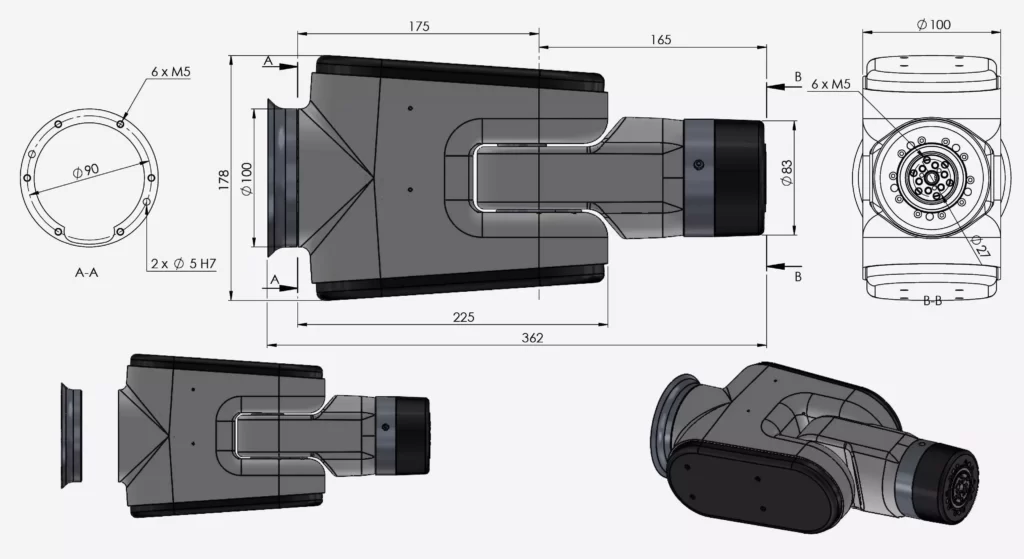
Rysunek gabarytowy - kiść K1

{kind=link}
{kind=link}
{kind=link}