
Czym jest sterownik ruchu i jakie posiada zalety nad zwykłym sterownikiem PLC omówiliśmy w poprzednim artykule. Decydując się oraz rozważając kupno – pojawia się jedno zasadnicze pytanie – jak i czym zaprogramować sterownik PLC? W tym artykule opisaliśmy dokładnie jakie kroki należy podjąć. Niezależnie od posiadanego sterownika ruchu marki Trio Motion, aby móc go zaprogramować potrzebujemy oprogramowania Motion Perfect. Można go pobrać po zalogowaniu ze strony producenta:
Po zainstalowaniu i uruchomieniu należy połączyć się z kontrolerem. Kontrolery z wyświetlaczem, wyświetlają na nim swój adres IP – następnie na komputerze ustawiamy adres z tej samej grupy adresowej na karcie sieciowej. Następnie w oprogramowaniu Motion Perfect wchodzimy w zakładkę Controller –> conection settings, wybieramy opcję Ethernet i podajemy adres IP kontrolera, z którym chcemy się połączyć:
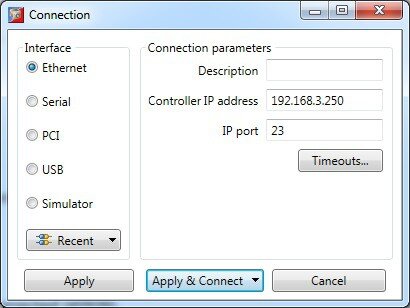
Naciskamy ‘apply’, aby zapisać ustawienia. Następnie przechodzimy ponownie do zakładki Controller, mając do wybory 4 tryby połączenia:
 Disconnected Oprogramowanie nie jest połączone z kontrolerem. Wszystkie narzędzia i porty komunikacyjne są zamknięte.
Disconnected Oprogramowanie nie jest połączone z kontrolerem. Wszystkie narzędzia i porty komunikacyjne są zamknięte.
 Direct Mode Oprogramowanie jest połączone z kontrolerem i umożliwia użycie terminala do wprowadzenia komend do kontrolera poprzez wiersz poleceń.
Direct Mode Oprogramowanie jest połączone z kontrolerem i umożliwia użycie terminala do wprowadzenia komend do kontrolera poprzez wiersz poleceń. Tool Mode Oprogramowanie jest połączone z kontrolerem i pozwala na korzystanie z narzędzi monitorowania w Motion Perfect. Ten tryb pozwala użytkownikowi zobaczyć listę programów na kontrolerze (aby można je było uruchomić i zatrzymać), ale nie pozwala na edycję żadnego z programów.
Tool Mode Oprogramowanie jest połączone z kontrolerem i pozwala na korzystanie z narzędzi monitorowania w Motion Perfect. Ten tryb pozwala użytkownikowi zobaczyć listę programów na kontrolerze (aby można je było uruchomić i zatrzymać), ale nie pozwala na edycję żadnego z programów. Sync Mode Oprogramowanie jest połączone z kontrolerem i otwarty jest projekt zlokalizowany na komputerze PC. Zawartość kontrolera i projektu jest zsynchronizowana, dzięki czemu lokalna kopia wszystkich programów jest zgodna z kopią na kontrolerze. Wszystkie narzędzia Motion Perfect są dostępne, a programy można edytować. Proces synchronizacji może obejmować usuwanie programów lub kopiowanie ich ze sterownika na komputer i odwrotnie.
Sync Mode Oprogramowanie jest połączone z kontrolerem i otwarty jest projekt zlokalizowany na komputerze PC. Zawartość kontrolera i projektu jest zsynchronizowana, dzięki czemu lokalna kopia wszystkich programów jest zgodna z kopią na kontrolerze. Wszystkie narzędzia Motion Perfect są dostępne, a programy można edytować. Proces synchronizacji może obejmować usuwanie programów lub kopiowanie ich ze sterownika na komputer i odwrotnie.
Wybierzmy połączenie w trybie Sync Mode. Aktualny tryb połączenia jest wyświetlany po prawej stronie paska stanu, w dolnej części głównego okna Motion Perfect. Po połączeniu w zakładce project–> wybieramy opcję new:
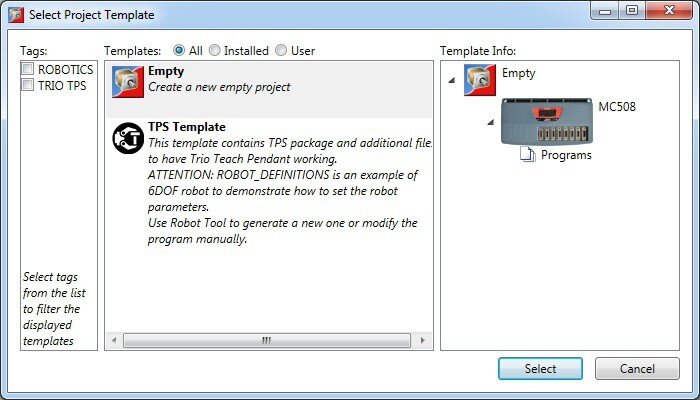
W moim przypadku kontroler, z którym jestem połączony to MC508. Tworzymy pusty projekt poprzez naciśnięcie przycisku ‘Select’:
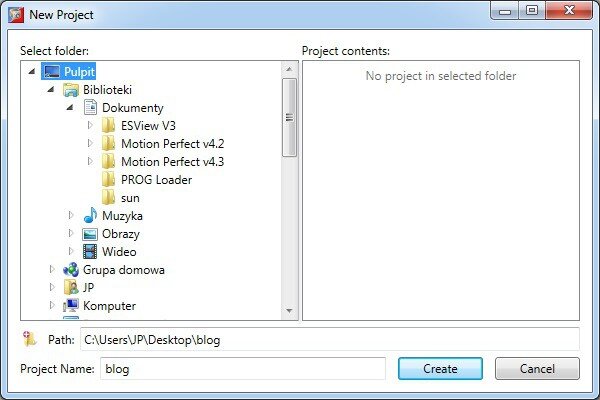
Należy wskazać ścieżkę oraz nazwę nowo tworzonego projektu i wybrać opcję ‘create’. Po utworzeniu pustego projektu definiujemy, jak mają pracować nasze osie. Do tego celu należy zdefiniować program MC config poprzez naciśniecie prawym przyciskiem myszy, na drzewku na zakładkę programs:
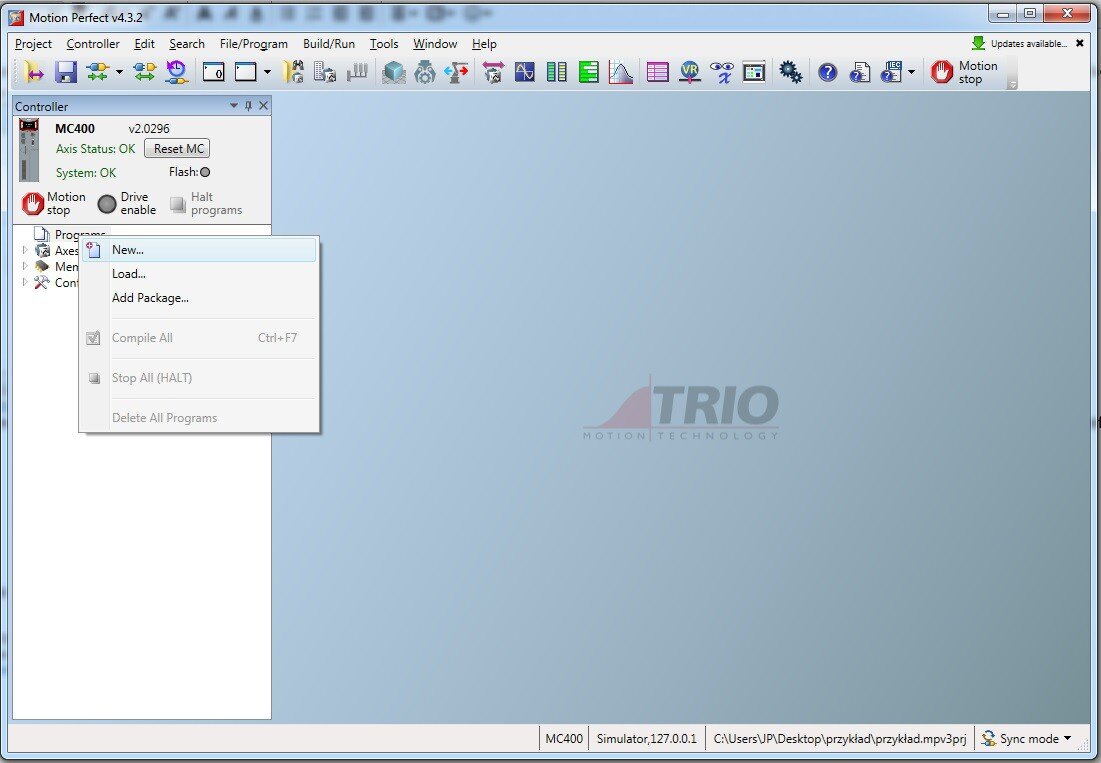
Po wybraniu opcji new pojawia nam się okno, w którym wybieramy opcję MC Config file:
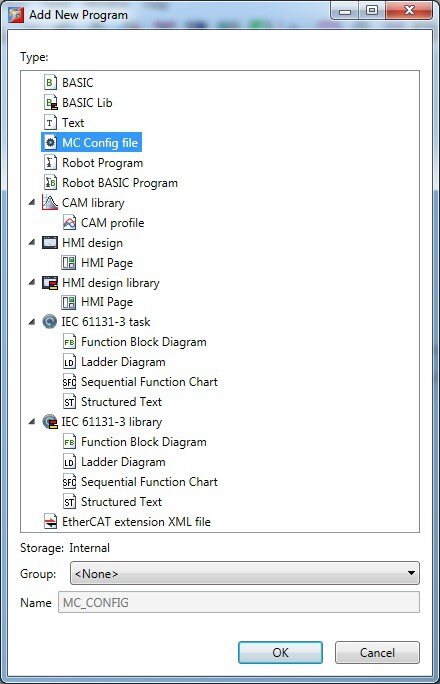
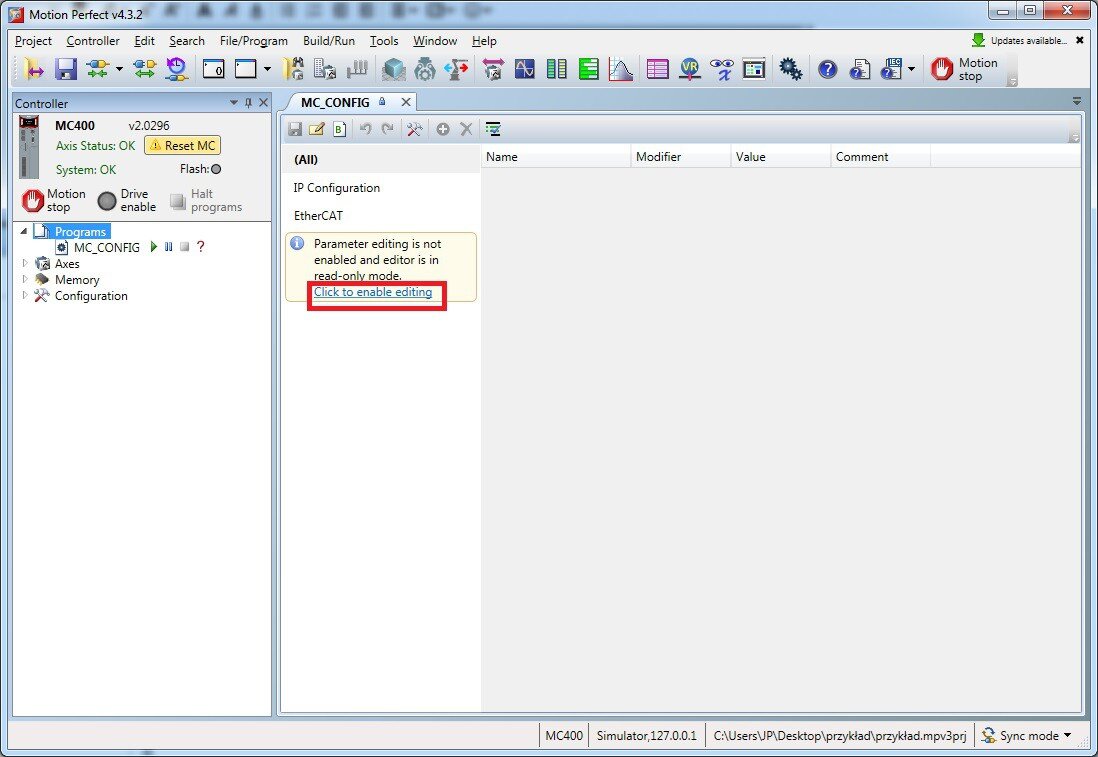
Naciskamy przycisk OK. Następnie włączamy możliwość edycji pliku poprzez wybranie opcji Click to enable editing:
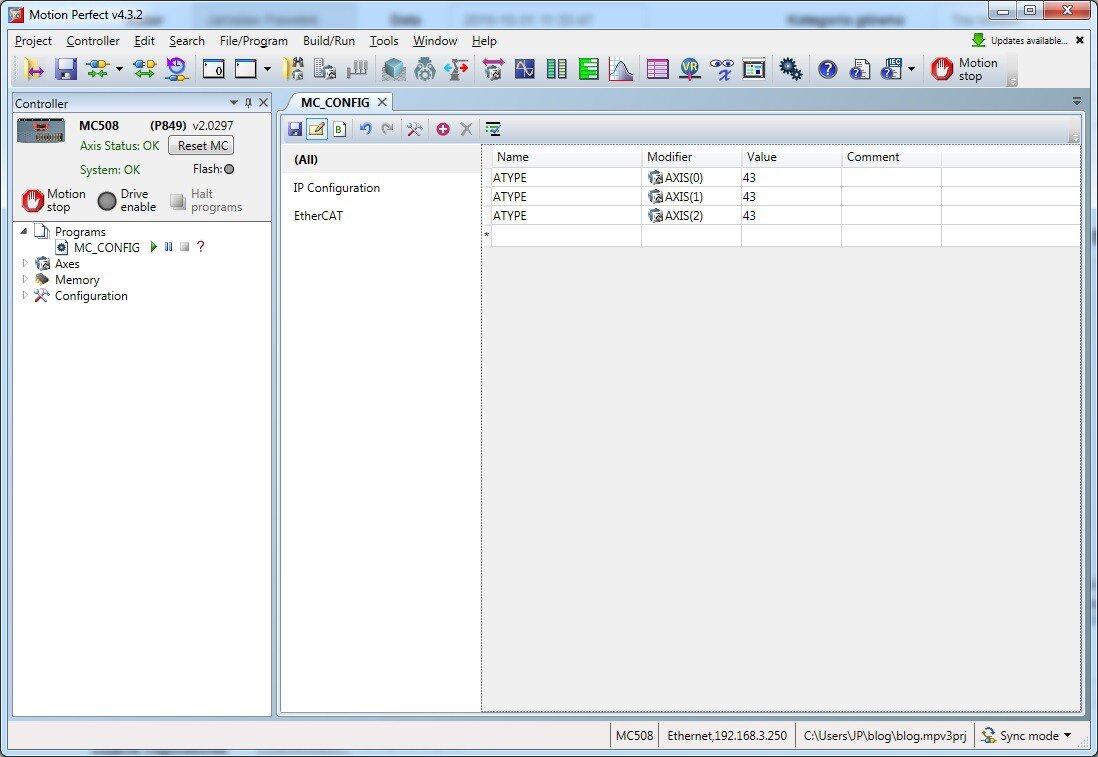
Funkcją Atype definiujemy jak nasze osie mają pracować. Posiadam 3 osie krokowe, stąd wybieram wartość funkcji Atype jako 43.
W programie Motion Perfect w zakładce Help –> Trio basic help jest możliwość wyszukania pomocy do funkcji Atype, gdzie opisane zostało, jak mogą pracować nasze osie:
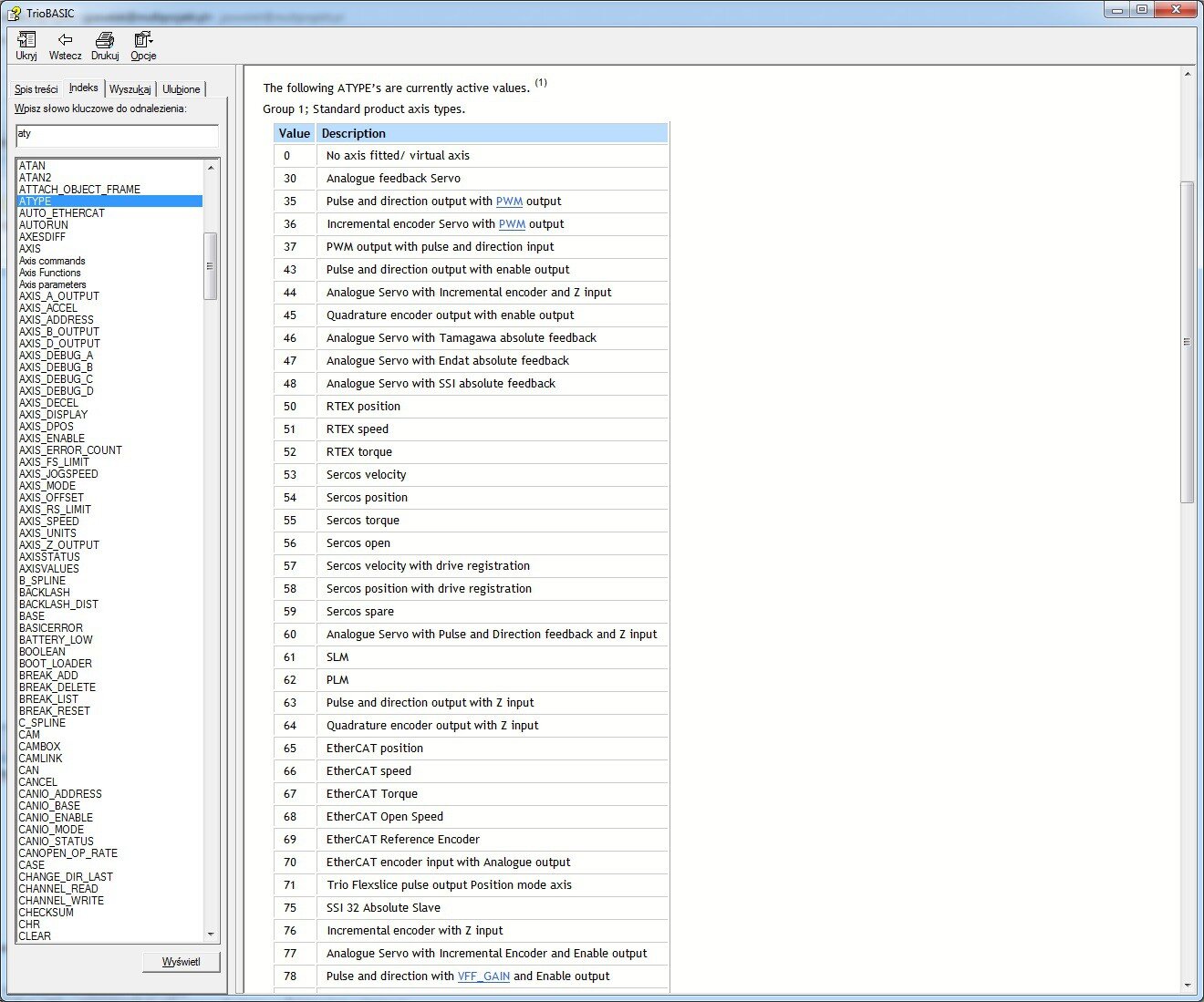
To jakie typy osi wspiera nasz kontroler możemy sprawdzić na stronie producenta w zakładce products –> wybierają dany kontroler i wchodząc w jego zakładkę specyfication, np. https://www.triomotion.com/public/products/p849.php gdzie możemy zaobserwować, że do wyboru mam następujące opcje:
| ATYPE | Description | |
| 43 | Pulse and direction output with enable output | |
| 45 | Quadrature encoder output with enable output | |
| 63 | Pulse and direction output with Z input | |
| 64 | Quadrature encoder output with Z input | |
| 76 | Incremental encoder with Z input | |
| 78 | Pulse and direction with VFF_GAIN and enable output 1 | |
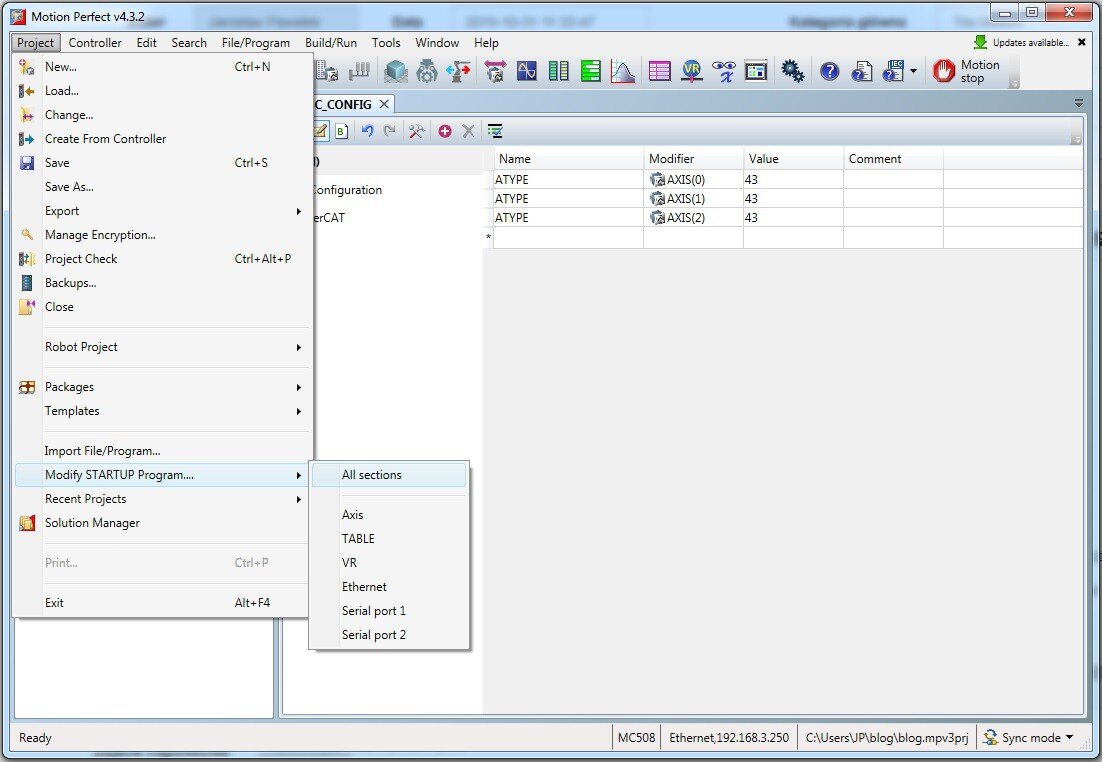
Po zdefiniowaniu jak nasza oś ma pracować należy zadać jej pewne parametry. W tym celu przechodzimy do zakładki project –> Modifiy startup program… –> All sections:
Wybieram, dla których osi chcę zdefiniować parametry:
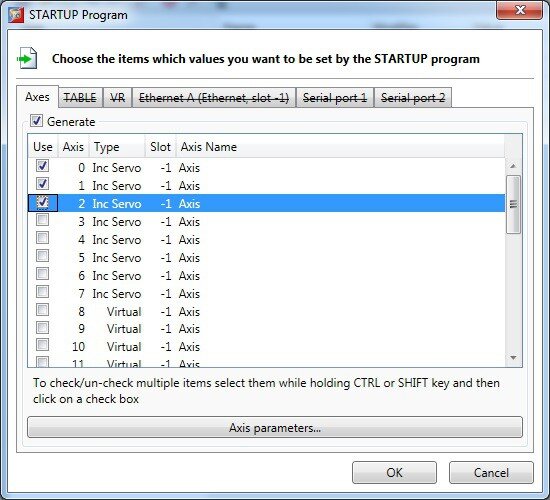
Pod przyciskiem axis parameters mogę wybrać, które parametry mnie interesują. Po naciśnieciu przycisku OK otrzymujemy komunikat do dodaniu startup-u do programu:
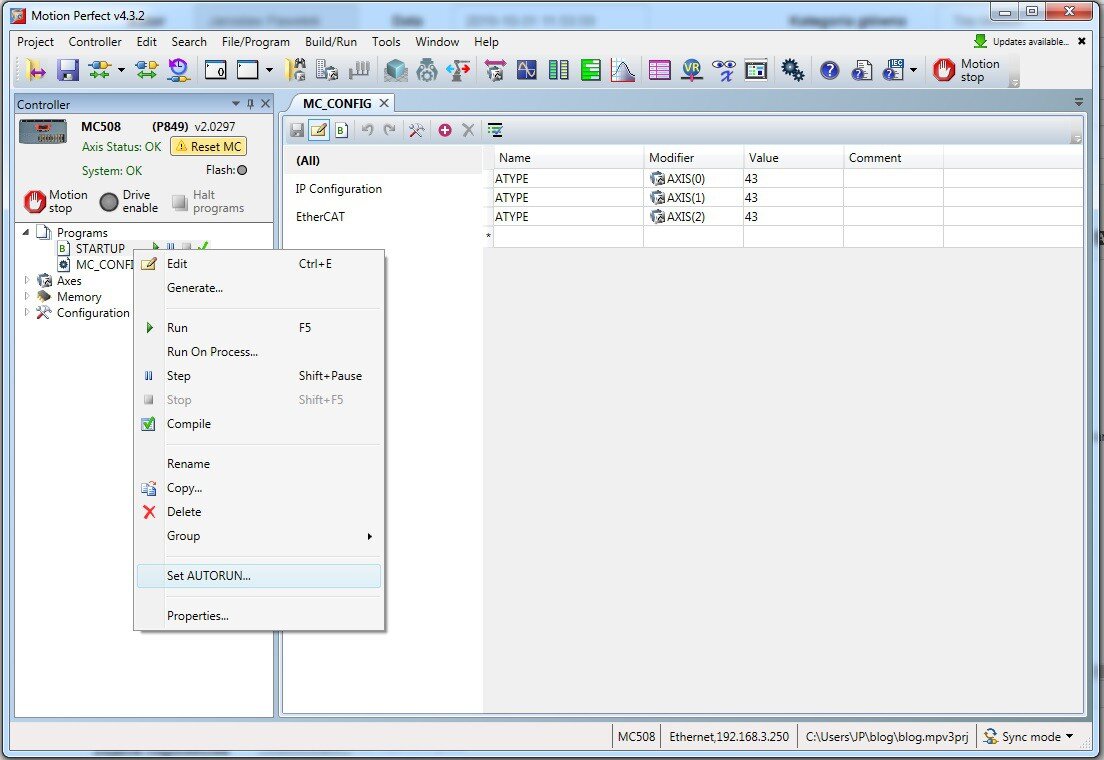
Naciskamy OK i startup zostaje utworzony. Dla wygody zdefiniujemy, aby uruchamiał się on automatycznie po włączeniu sterownika. W tym celu na drzewku programu wybierzemy dla startup-u opcję set autorun:
Jako proces wybierzemy default:
Klikamy ok i dla programu zostaje ustawiony autorun. Warto zobaczyć, co utworzyło się w startup-ie. W tym celu można kliknąć dwa razy na drzewku programów w startup. Jest w nim lista parametrów dla każdej wybranej osi. Z ważniejszych parametrów:
BASE – wybrana oś
UNITS – ilość impulsów na obrót
ACCEL – przyśpieszenie
DECEL – opóźnienie
SPEED – prędkość
DATUM_IN – numer wejścia bazującego
Oczywiście dla każdej funkcji możemy znaleźć szersze wyjaśnienie w zakładce Help –> Trio basic help, do czego gorąco zachęcam. Teraz szybkie podsumowanie tego, co szerzej zostało omówione powyżej:
Zapraszamy do następnej części kursu.
 | Autor: Jarosław PawełekAbsolwent Akademii Górniczo – Hutniczej im. Stanisława Staszica w Krakowie na kierunku Automatyka i Robotyka ze specjalnością Automatyka i Metrologia. Przygodę z automatyką rozpoczynał w firmie od stanowiska praktykanta. Przechodząc kolejno na stanowisko Doradcy ds. technicznych oraz obecnie zajmując stanowisko Kierownika Działu Wsparcia Technicznego stara się zapewniać najlepsze wsparcie merytoryczne dla naszych klientów. Prywatnie miłośnik fotografii. |
