
Zgodnie z Przemysłem 4.0
Silniki liniowo-obrotowe do napełniania i zamykaniaDzięki silnikom liniowo-obrotowym procesy zamykania
Silniki liniowo-obrotowe do napełniania i zamykaniaDzięki silnikom liniowo-obrotowym procesy zamykania

Autor: Artur SobasŚwieżo upieczony Inżynier, student II stopnia Inżynierii Mechatronicznej

Serwonapęd stosowany jako autonomiczne rozwiązanie sterujące – dlaczego nie? Dzięki
Autor: Artur SobasŚwieżo upieczony Inżynier, student II stopnia Inżynierii Mechatronicznej
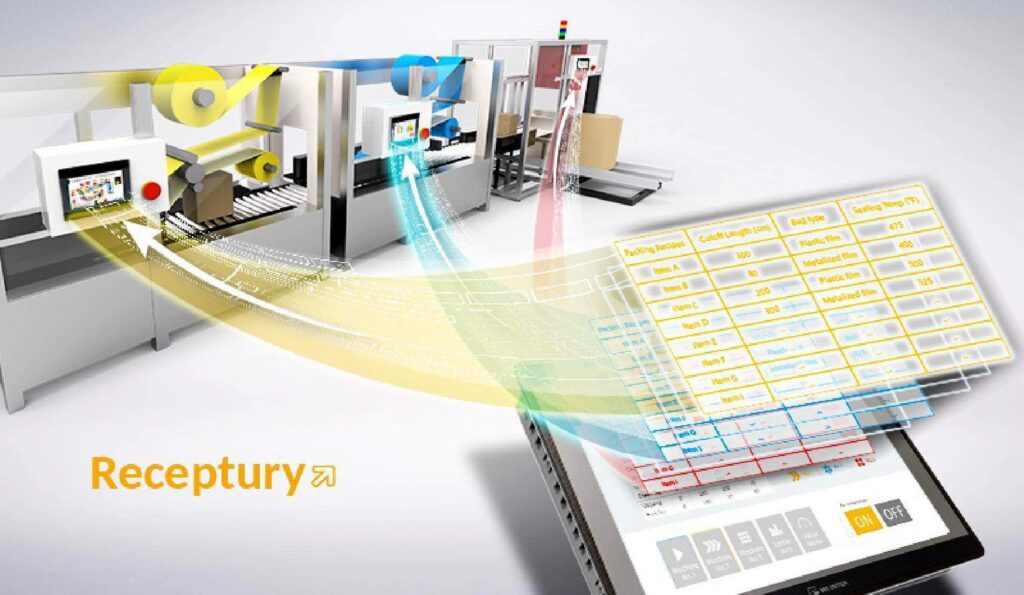
Rutynowe postępowanie przed wykonaniem ruchu – definiowanie parametrów osi Dobrą praktyką
W fabrykach większość maszyn działa zgodnie z kombinacją parametrów specyficznych dla
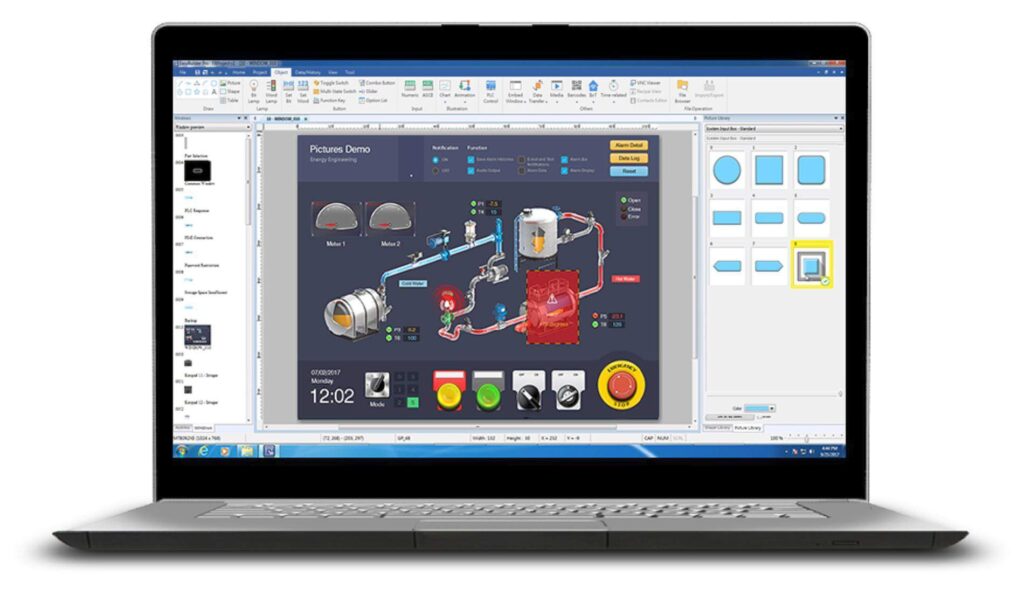
W tej części kursu omówimy sposób definicji, wyświetlania alarmów oraz

W tej części kursu zajmiemy się możliwością zapisywania danych procesowych.

W tej części kursu zajmiemy się możliwością ograniczenia dostępu i