
Dzisiejsze zaawansowane aplikacje kontroli ruchu wymagają od serwonapędów, aby te były coraz mniejsze przy jednoczesnym zachowaniu, a nawet zwiększeniu ich mocy. Maszyny oparte na kontroli ruchu wykorzystują najczęściej wbudowane napędy o dużej mocy, które muszą funkcjonować w ograniczonej przestrzeni, aby wpasować się w kompaktowość współczesnych maszyn. Z tego powodu powstaje wiele miniaturowych serwonapędów, które mogą być montowane bezpośrednio na silniku lub w przegubach robotów.
Znaczenie serwonapędów w automatyzacji przemysłu
Kompaktowe i wydajne wbudowane serwonapędy odgrywają ważną rolę w robotyce, która coraz bardziej zyskuje na znaczeniu w różnorodnych branżach przemysłowych. Roboty pomagają chociażby wprowadzać najnowocześniejsze metody chirurgiczne i diagnostyczne w medycynie. Mają też istotne znaczenie w branży produkcyjnej półprzewodników, pozwalając na manipulację małymi, delikatnymi elementami lub też złożonymi montażami z najwyższą precyzją i higieną. Z kolei w logistyce roboty mobilne mogą samodzielnie nawigować po magazynach i centrach dystrybucyjnych, optymalizując procesy i przyspieszając kompletację zamówień.

Dodatkowo, wbudowane serwonapędy znajdują zastosowanie w takich sektorach jak przemysł lotniczy, automatyzacja laboratoriów oraz sprzęt biomedyczny. Często wiąże się to z zastosowaniem zautomatyzowanych pojazdów kierowanych (AGV), autonomicznych robotów mobilnych (AMR) i innych skomplikowanych systemów, które muszą transportować przedmioty, nawigować w przestrzeni i realizować szereg różnorodnych zadań.
Serwonapędy to urządzenia będące podstawą dla wszelkich skomplikowanych systemów. To od nich zależy spełnienie wymagań użytkownika (dotyczących sterowania ruchem, rozmiaru i wydajności maszyny) wobec aplikacji. Wobec tego przed serwonapędami stoją takie wymagania jak:
- Zapewnienie wysokiej dokładności pozycjonowania i powtarzalności.
- Osiąganie doskonałej wydajności dynamicznej, w tym płynnych profili ruchu, krótkich czasów reakcji oraz precyzyjnej kontroli prędkości i momentu obrotowego.
- Obsługa protokołów komunikacyjnych czasu rzeczywistego, takich jak EtherCAT, w celu zapewnienia niezawodnej komunikacji między napędami a systemem sterowania.
- Kompaktowy rozmiar umożliwiający montaż na samym silniku lub w przegubie robota.
- Posiadanie wystarczającej mocy, pomimo niewielkich rozmiarów, która pozwoli poruszać ramieniem robota, pojazdem AGV lub AMR z najwyższą niezawodnością i wydajnością.
Spełnienie tych wszystkich wymagań jest jednak bardzo trudne. Zaprojektowanie wydajnych, kompaktowych serwonapędów, które mogą działać w ciasnych przestrzeniach przegubów robotów, podwozi AGV i innych wbudowanych aplikacji sterowania ruchem, wiąże się z wieloma wyzwaniami projektowymi, takimi jak zarządzanie poziomem temperatury.
Jak zachować niską temperaturę urządzenia?
Zmniejszenie rozmiaru serwonapędów powoduje jednocześnie zmniejszenie powierzchni potrzebnej do skutecznego odprowadzania ciepła. Z tego powodu zarządzanie poziomem temperatury staje się coraz trudniejsze. W takim przypadku projektant napędów musi skorzystać z wielu różnych zasad projektowania, które w połączeniu pozwalają na skonstruowanie małych wbudowanych napędów. Tak właśnie powstają nasze serwonapędy Nano, oferujące wiodącą w branży gęstość mocy i wydajność (>99%), co pomaga w zarządzaniu ciepłem i zakłóceniami elektromagnetycznymi (EMI), umożliwiając znaczną miniaturyzację tych urządzeń.

Potrzebujesz serwowzmaczniaczy do ekstremalnych warunków?
Znaczenie rodzaju i jakości materiału w obwodach
Pierwszym i najbardziej oczywistym rozwiązaniem w kwestii odprowadzania ciepła jest ulepszenie materiałów płytki obwodu napędu. Napęd Nano, składający się z czterech płytek PCB, wykorzystuje jednostronną płytkę z podłożem ze stopu miedzi (TClad). Ta płytka, która obsługuje zasilanie urządzenia, w standardowym wariancie miałaby aluminiowe podłoże, jednak zmiana na odpowiedniejszy stop miedzi, jakim jest TClad, przynosi trzykrotną poprawę przewodzenia ciepła.
Niestandardowe komponenty
Innym rozwiązaniem jest zastosowanie niestandardowych komponentów w celu zwiększenia możliwości odprowadzania ciepła. Na przykład, napęd Nano posiada specjalnie zaprojektowane styki do odprowadzania prądu. Są one nie tylko mniejsze niż standardowe złącze, ale są również zaprojektowane tak, aby odprowadzać ciepło z powierzchni.
Dynamiczne dostrajanie napędu bramki
Stopień wyjściowy składa się z dwóch kluczowych komponentów: układu scalonego napędu bramki (IC) i tranzystora polowego metal-izolator-półprzewodnik (MOSFET), które są standardowymi elementami dostępnymi właściwie od ręki. W celu maksymalizacji możliwości napędów Nano w zakresie zarządzania poziomem ciepła, Copley Controls podejmuje kluczowe decyzje projektowe:
- Układ scalony sterownika bramki: wybieramy kompaktowe sterowniki półmostkowe o wysokich możliwościach w zakresie prądu wyjściowego. Ważne jest wybranie sterowników o dużych możliwościach prądowych, ponieważ maksymalny prąd wyjściowy ogranicza rozmiar użytecznego stopnia wyjściowego MOSFET.
- Stopień wyjściowy MOSFET: komponenty muszą charakteryzować się małą obudową, niską rezystancją termiczną, wysokim prądem i niską rezystancją dren-źródło w stanie załączenia (RDS(on)).
Kluczowe procesy w zarządzaniu ciepłem zachodzą pomiędzy układem scalonym napędu bramki a tranzystorem polowym. Dynamiczne dostrajanie napędu bramki kontroluje czas między włączeniem i wyłączeniem urządzenia zasilającego, aby osiągnąć niskie rozpraszanie mocy przy jednoczesnym spełnieniu wymagań kompatybilności elektromagnetycznej (EMC).
Pomiar prądu
Aby jeszcze bardziej zredukować rozpraszanie ciepła, napęd Nano wprowadza kilka metod pomiaru prądu. To nowatorskie podejście do wykrywania prądu wykorzystuje rezystory pomiarowe o bardzo niskiej rezystancji, umożliwiając precyzyjne mierzenie prądu przy minimalnym rozpraszaniu energii.
Ostatecznie, najmniejsze i najpotężniejsze serwonapędy muszą zastosować szereg strategii, aby zredukować ilość gromadzącego się ciepła. W przypadku Nano dotyczy to ogólnej budowy oraz układu komponentów zasilających na płytce. W razie potrzeby możemy również wykorzystać szereg opcji w oprogramowaniu firmware napędu, by dalej ograniczać rozpraszanie ciepła, jeśli zajdzie taka potrzeba. Na przykład jedna z funkcji – zwana zaciskaniem magistrali – skutecznie zmniejsza straty przełączania nawet o 33%.
Zarządzanie ciepłem w najmniejszych i najbardziej potężnych napędach nie opiera się na pojedynczej zasadzie projektowej. Jest to raczej efekt wielu pomniejszych, starannie rozważonych decyzji projektowych.
Seria Nano cyfrowych serwonapędów
Seria Nano to przykład serwonapędu, który łączy w sobie odpowiednią gęstość mocy i funkcje zarządzania temperaturą. Każda kompaktowa jednostka może być łatwo zintegrowana z pojazdami AGV, AMR, zrobotyzowanymi przegubami i innym zautomatyzowanym sprzętem. Serwonapędy Nano zostały zaprojektowane z myślą o aplikacjach o ograniczonej przestrzeni, w których wymagana jest precyzyjna kontrola prędkości i położenia. Dzięki tej nowoczesnej technologii sterowania ruchem jej użytkownik może osiągnąć niezrównaną dokładność i wydajność w swoich aplikacjach.
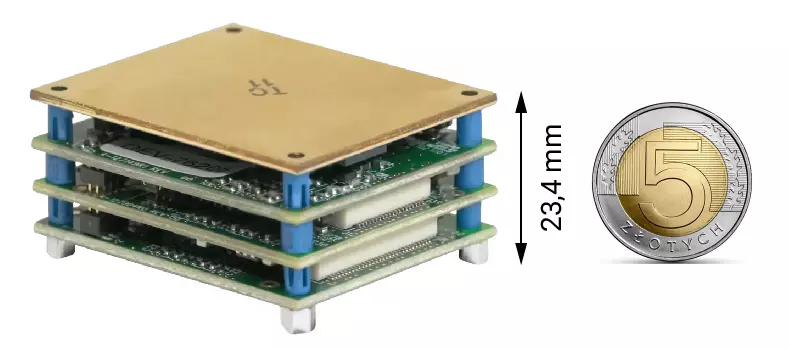
Seria Nano ma niewielkie wymiary 35 x 30 x 23,4 mm, działa z napięciem wejściowym od 9 do 180 V DC i dostarcza do 35 A prądu ciągłego i 70 A prądu szczytowego, zapewniając wyjątkową gęstość mocy i wydajność. Jego kompaktowy rozmiar zapewnia również integratorom elastyczność w montażu jednostek bezpośrednio na silniku lub w przegubach robota. Z kolei opcjonalne złącze PCB i oprogramowanie rozruchowe CME ułatwiają konfigurację i kalibrację.
Dodatkowe funkcje i specyfikacje obejmują:
- Funkcja bezpiecznego wyłączenia momentu obrotowego (Safe Torque Off – STO) zgodna z Sil 3, Kategoria 3 PLe.
- Sześć wejść cyfrowych i cztery wyjścia cyfrowe.
- Cztery kombinacje napięcia i prądu.
- Jedno 12-bitowe wejście analogowe ±10 V.
- Enkodery absolutne BiSS-C i SSI (główny).
- Cyfrowy enkoder inkrementalny (główny i dodatkowy).
- Narzędzia do analizy częstotliwości.
- Wsparcie podwójnego sprzężenia zwrotnego enkodera.
- 32-bitowe filtry zmiennoprzecinkowe i wiele filtrów zaawansowanych.
Ponadto seria Nano obsługuje protokoły komunikacyjne EtherCAT lub CANopen, umożliwiając wymianę danych w czasie rzeczywistym. Modele Nano Module EtherCAT NES i Nano Module CANopen NPS są dostępne z opcją EZ Board w celu uproszczenia montażu.
Najlepsze rozpraszanie mocy w swojej klasie
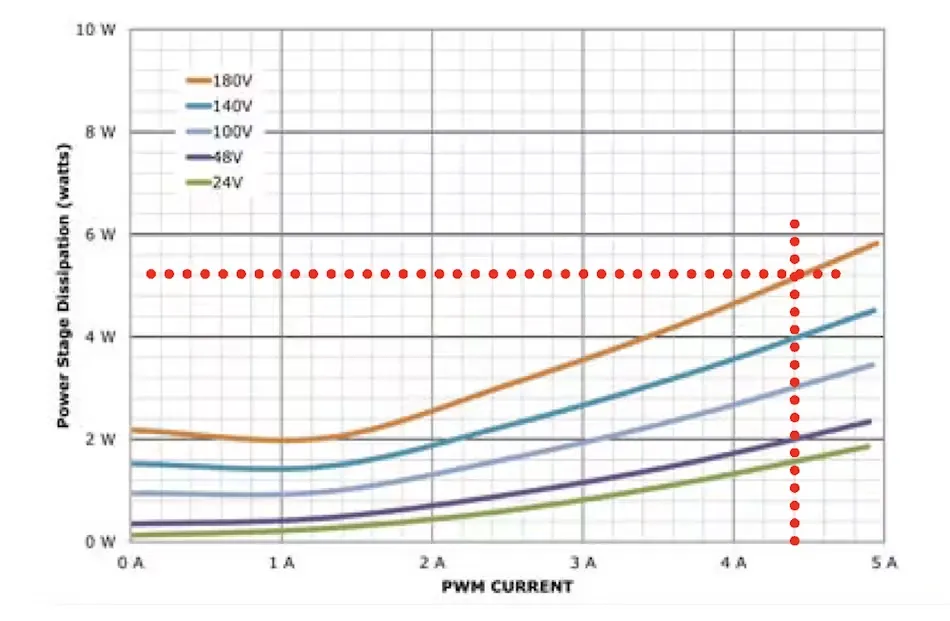
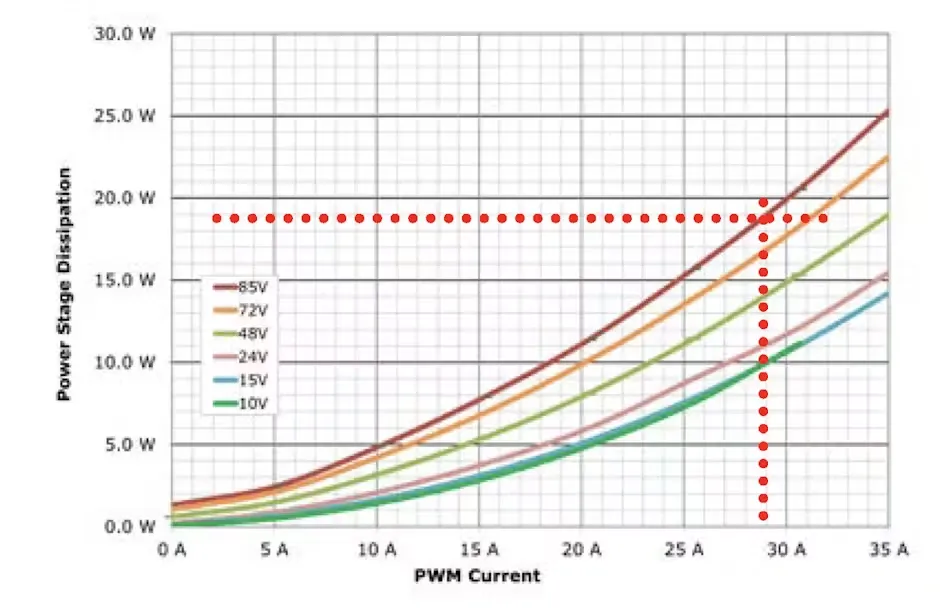
Poniższe wykresy przedstawiają rozpraszanie mocy w naszych serwonapędach NES-090-70 i NES-18-10 Nano, podczas gdy wyjścia (PWM) napędzają silnik. Dodając rozpraszanie mocy PWM do rozpraszania mocy Vlogic, otrzymujemy całkowite rozpraszanie mocy napędu wyrażone w watach.
W przypadku NES-090-70, linie przerywane pokazują rozproszenie 18 watów (W) przy ciągłym prądzie 28 Adc i +HV = 85 Vdc. W przypadku modeluNES-18-10 linie przerywane pokazują rozproszenie 5,2 W przy prądzie ciągłym 4,4 A i napięciu +HV = 180 VDC.
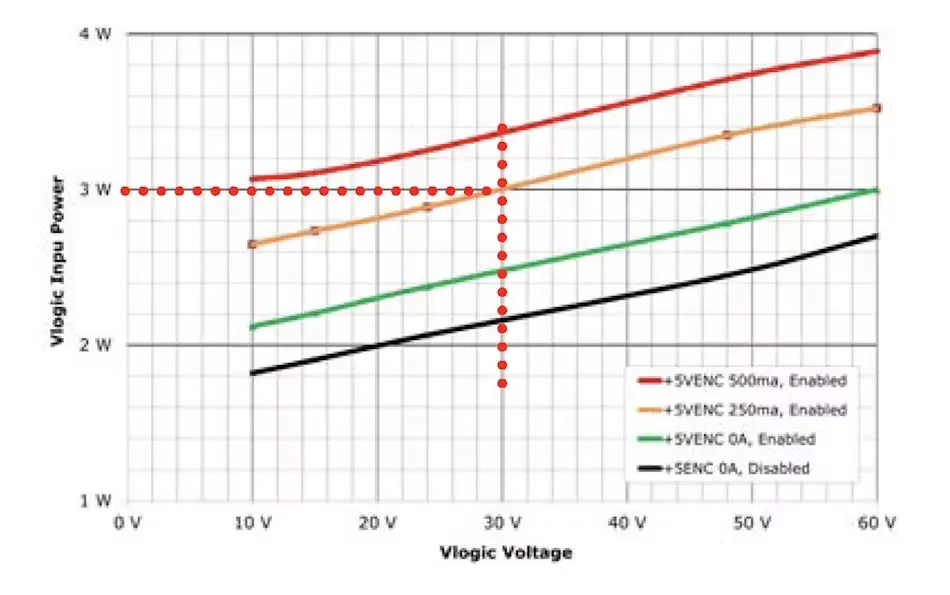
Ostatni wykres mający zastosowanie do wszystkich modeli NES, ilustruje rozpraszanie mocy w układach Vlogic, które dostarczają zasilanie do układów sterujących napędu oraz zewnętrznych enkoderów. Dodanie rozpraszania PWM do rozpraszania mocy w układach Vlogic pozwala na obliczenie całkowitej wartości rozpraszania mocy dla napędu. Przerywane linie na wykresie wskazują na rozpraszanie 3,0 W przy Vlogic = 30 Vdc, kiedy napęd jest aktywowany i generuje wyjście 250 mA dla enkodera.
W przypadku NES-090-70, linie przerywane pokazują rozproszenie 18 watów (W) przy ciągłym prądzie 28 Adc i +HV = 85 Vdc. W przypadku modeluNES-18-10 linie przerywane pokazują rozproszenie 5,2 W przy prądzie ciągłym 4,4 A i napięciu +HV = 180 VDC.
Autorem artykułu jest Dean Crumlish, menedżer Copley Controls ds. produktów i zastosowań.